
In the context of video editing, enforcing spatio-temporal consistency is an important issue.
With that purpose, the current variational models for gradient domain video editing include space and time regularization terms. The spatial terms are based on the usual space derivatives, the temporal ones are based on the convective derivative, and both are balanced by a parameter β.
However, the usual discretizations of the convective derivative limit the value of β to a certain range, thus limiting these models from achieving their full potential. In this paper, we propose a new numerical scheme to compute the convective derivative, the deblurring convective derivative, which allows us to lift this constraint.
Moreover, the proposed scheme introduces less errors than other discretization schemes without adding computational complexity.
We use this scheme in the implementation of two gradient domain
models for temporally consistent video editing, based on Poisson and
total variation type formulations, respectively.
We apply these models to three video editing tasks:
inpainting correction, object insertion and object removal.
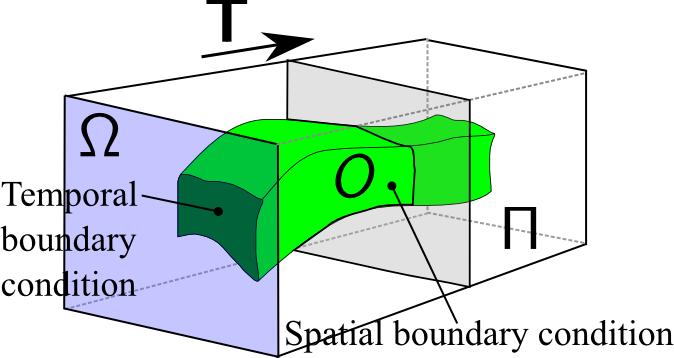
This functional is defined on the spatio-temporal volume $\Pi := \Omega \times \mathbb T$, where $\Omega\subset \mathbb R^2$ is the rectangular image domain, $\mathbb T = [0,T]$ is the temporal domain, and $O\subset \Omega\times \mathbb T$ denotes the spatio-temporal domain where the editing is performed. $u:\Omega\times\mathbb T\rightarrow \mathbb R$ denotes a scalar function representing the video, and $v:\Omega\times\mathbb T\rightarrow \mathbb R^2$ is the velocity field obtained from the unaltered video sequence $u_{0}$. We consider $p\in\{1,2\}$ and $\beta \ge 0$.
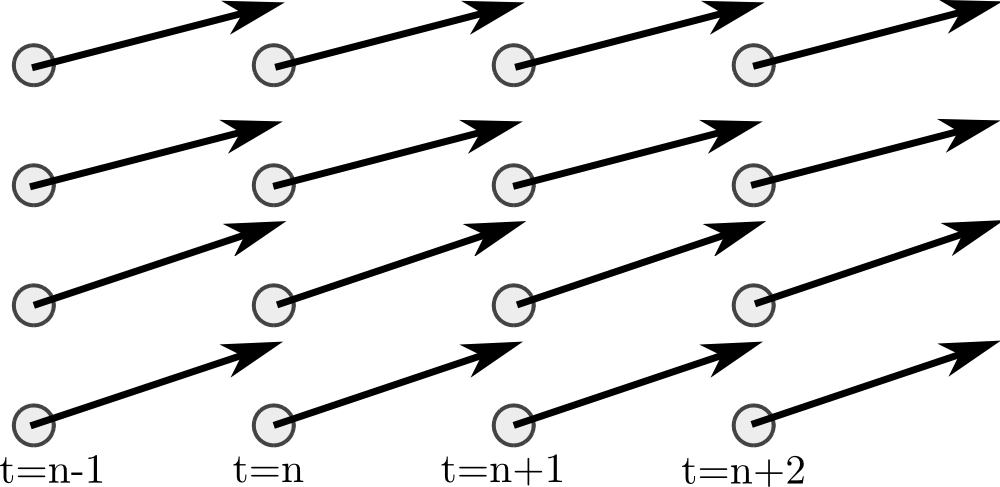
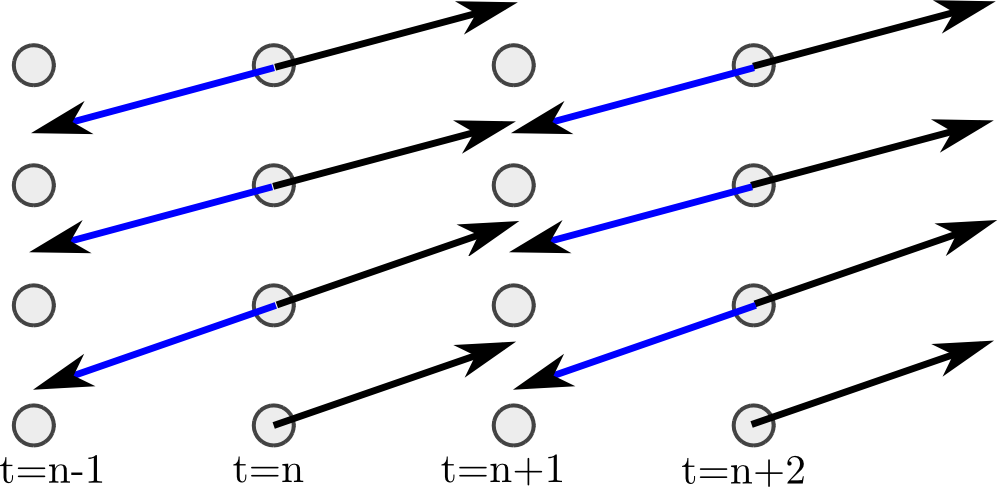
The velocity field $v$ is given by the optical flow of the original video $u_{0}:\Pi\to \mathbb R$. In our experiments we compute it using [Brox et. al. High accuracy optical flow estimation based on a theory for warping. 2004]. The forward optical flow $v^+:\Omega\times \mathbb T\rightarrow \mathbb R^2$ between two frames $u(\cdot, t)$ and $u(\cdot, t+1)$ is the vector field such that $u(x, t)$ and $u(x+v^+(x,t), t+1)$ correspond to the same point in the scene. Similarly, the backward optical flow $v^-$, relates the frame at $t$ with the one at time $t-1$. We can discretize the convective derivative either using the forward or backward optical flow \begin{align} \partial^+_{v}u(x,t) := \hat u(x + v^+(x,t), t+1) -u(x,t), \\ \partial^-_{v}u(x,t) := \hat u(x,t) - u(x + v^-(x,t), t-1) , \end{align} where $\hat u(x + v^+(x,t), t+1)$ is the bilinear interpolation of $u(\cdot, t+1)$ at $x + v^+(x,t)$.
Experiment 1 compares both discretizations of the convective derivative. Observe that the effects of the two discretizations $\partial^-_v$ and $\partial^+_v$ for the convective derivative are somehow opposite. The first introduces blurring in the solution, while the second sharpens the solution and introduces oscillations.
 $v^+$- scheme DCD scheme
$v^+$- scheme DCD scheme
This observation motivates the search for a new discretization for the convective derivative, one which reduces these distortions end preserve the information for longer periods of time. The idea of the deblurring convective derivative is to attain this objective as the balance of two opposing processes. That is, alternating both schemes to moderate each other's effects. Expriment 1 shows that it works.
Input sequence and mask. 108 frames

|
 Display the results.
Display the results.
 Display the results.
Display the results.
 Display the results.
Display the results.
| Input sequence and mask. 45 frames with occ & disocc | DCD with p=2 β=0.0001 | Forward optical flow |

|

|
|